Veuillez choisir le dossier dans lequel vous souhaitez ajouter ce contenu :

Membre a labase
Alexandre Auffray : Polytechnique Montréal
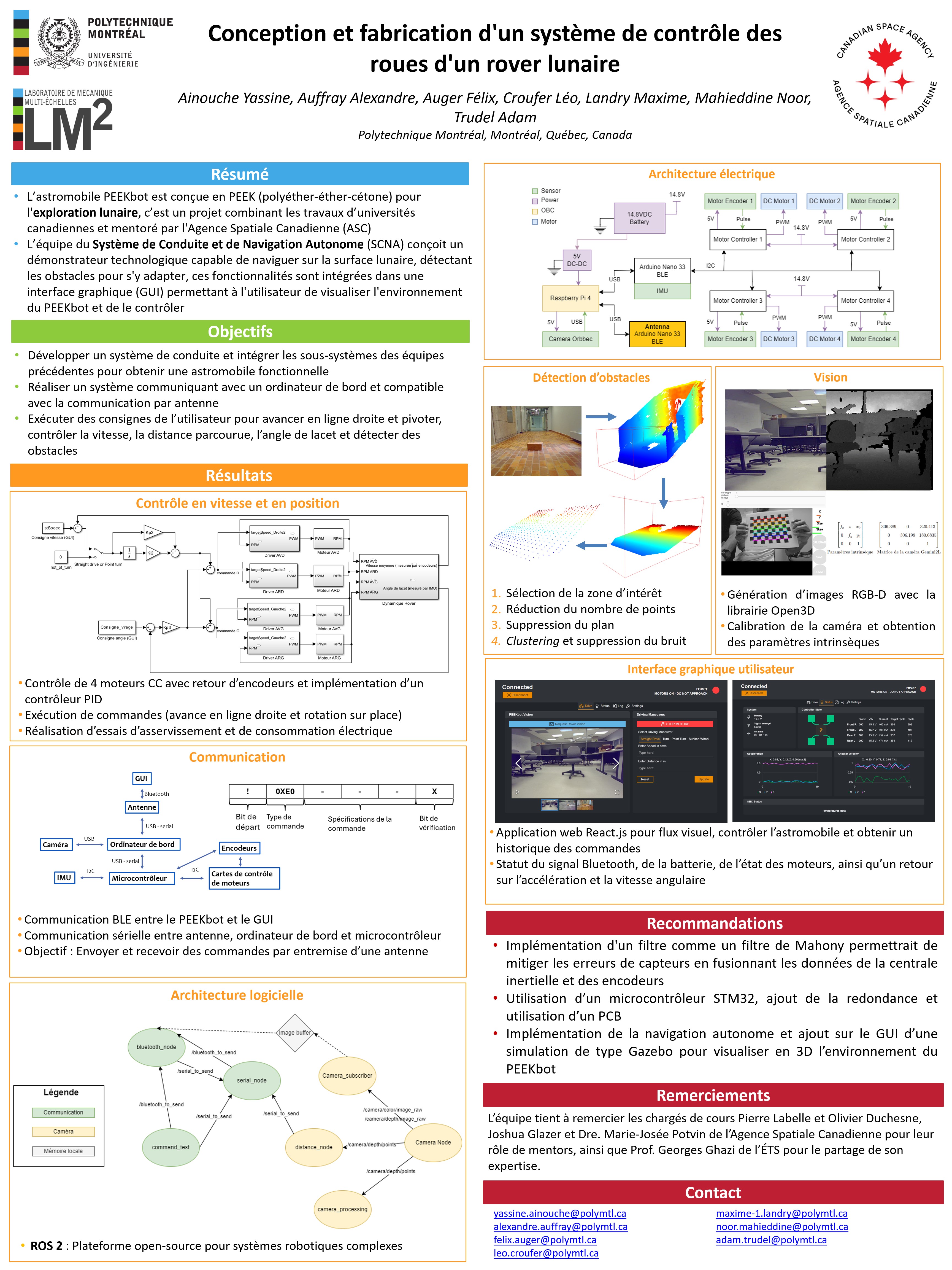
L'astromobile PEEKbot est un projet de recherche supervisé par l'ASC, axé sur le développement d'une nouvelle génération d'astromobiles canadiens en composites, plus légers que leurs prédécesseurs et alimentés exclusivement par des panneaux solaires. L'équipe du Système de Conduite et de Navigation Autonome (SCNA) de Polytechnique Montréal oeuvre à l'achèvement du projet de conduite de l'astromobile et à l'intégration de différentes composantes. Initié en 2018, le projet PEEKbot devrait se conclure au printemps 2024. L'équipe se concentre sur la conception d'un démonstrateur technologique capable de naviguer de manière autonome sur la surface lunaire, en détectant les pentes et les obstacles à l'aide d'une caméra stéréoscopique pour s'y adapter. Un système d'extraction est également prévu en cas d'enlisement d'une roue dans le régolithe lunaire ou de blocage sur un obstacle. L'utilisateur peut visualiser l'environnement du PEEKbot et le contrôler via une interface graphique intégrant ces fonctionnalités. Le projet innove dans l'architecture électrique et logicielle, combinant le contrôle et
l'asservissement semi-autonome du rover à la reconstruction numérique de la surface de l'environnement. Cette approche permet au PEEKbot d'accomplir sa mission en terrain inhospitalier malgré les délais de communication. Les compétences développées dans la conception d'astromobiles (semi) autonomes peuvent être exploitées pour des missions futures, qu'elles soient lunaires ou martiennes.
L’époque actuelle est incontestablement riche en développements dans le domaine de l’exploration spatiale. Alors que le retour d’humains en orbite autour de la Lune (Artemis II) et sur la Lune (Artemis III) est imminent, les missions robotisées d’exploration spatiale s’y préparent activement. Des astromobiles, dans le cadre de missions telles que VIPER et Lunar Rover Mission, fouleront bientôt la région du pôle Sud lunaire pour tenter de détecter de la glace d’eau, qui pourrait permettre d’y soutenir une présence humaine à long terme, étudier l’évolution du système solaire et y démontrer des technologies. Pendant ce temps, l’astromobile Perseverance cherche des traces de vie sur Mars, le télescope spatial James Webb scrute le passé pour y observer les anciennes lueurs de l’aube de l’Univers et la mission OSIRIS-REx vient de rapporter sur Terre du régolithe de l’astéroïde Bennu, dont l’analyse permettra de mieux comprendre la formation du Système solaire et l’apparition de la vie sur Terre. Des études réalisées en laboratoire et en milieux analogues aident à préparer, à interpréter et à mettre en contexte ces observations.
Le colloque « Contributions en sciences et génie pour l’exploration spatiale » vise à présenter les avancées récentes et les défis liés à la science et à l’ingénierie dans le domaine de l’exploration spatiale, tous corps célestes confondus.
Titre du colloque :
Thème du colloque :
 Voir l'affiche
Voir l'affiche
